Biomedical Robotics Lab – Robotics research in biomedical applications
The researchers in the Biomedical Robotics lab aim to investigate novel robotic solutions for immediate medical challenges, with a focus on small-scale robotic systems for minimally invasive diagnostics and therapeutics.
The Biomedical Robotics lab was founded by Dr. ZHANG Jiachen and started its research activities in the fall of 2021 at City University of Hong Kong. We aim to investigate novel design, fabrication, and control strategies to construct application-oriented robotic systems that have the potential to meet the ever-growing need in the biomedical field. Our motivation is employing scientific and technological advancement to help patients. The robots we are developing possess two features: (a) minimally invasiveness to minimize patients’ trauma, and (b) localized operation to improve medicine’s efficacy and weaken systemic side effects.
News
2024-Dec-12 Finalist of Best Paper Award
We are pleased to share that our conference paper, “Needle Selection in a Miniature Robotic Penetration System for Biomedical Applications,” has been chosen as the Finalist of Best Paper Award in Automation at IEEE ROBIO 2024. Congratulations to Yuxuan, Ruomao, Zihan, and Chunyu!
2024-Dec-11 IEEE ROBIO Workshop
We are thrilled to organize a workshop at IEEE ROBIO 2024. We look forward to meeting you at Bangkok, Thailand this Dec!
2024-Sept-5 Student Achievements
Mr. Yuxuan Xiang was awarded the Institutional Research Tuition Scholarship and Outstanding Academic Performance Award. Mr. Ruomao Liu was awarded the Research Tuition Scholarship. Congratulations to Yuxuan!
Research Interests
The research in Biomedical Robotics Laboratory focuses on the design, fabrication, control, and application of novel robotic systems for genuine biomedical applications.
Design
Miniature robots pose unique challenges in design as a result of the lack of onboard space to carry traditional robotic components such as computing units and batteries. Novel design approaches utilize the so-called “physical intelligence” to achieve stimuli-responsiveness and further realize robotic functionalities. These robots are often in the forms of untethered miniaturized systems such as capsules and wearable devices. When being deployed inside human bodies, biocompatibility and biodegradability should be taken into consideration early in the design phase.
Fabrication
The fabrication strategies for miniature robots are limited in the degree-of-freedom in materials, geometries, and other properties. Novel fabrication platforms aim to relax and ultimately remove these constraints to physically realize designs with sophisticated capabilities to meet demanding real-world challenges.
Control
Reliable and accurate control of miniature robots is the key to enable them to work in complex real-world environments. Computer vision-based autonomous controllers are developed and deployed for these robots in various applications. When deployed inside human bodies, the feedback information available is extremely limited and obscured, in which scenarios accurate and reliable actuation and control of these robots are challenging and should be investigated.
Application
The usefulness of these novel robots boils down to their applications in our real world. Thanks to their miniature body size, they hold revolutionary potentials in minimally invasive diagnostics and therapeutics, such as targeted drug delivery and minimally invasive surgery. The exploration of their genuine biomedical applications is carried out in our lab.
Publications
PI's Google ScholarSelected publications
- Yuxuan Xiang, Ruomao Liu, Zihan Wei, Chunyu Jin, Jiachen Zhang, "Needle Selection in a Miniature Robotic Penetration System for Biomedical Applications," 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 583-588, 2024.
- Ruomao Liu, Yujun Chen, Zhen Yin, Jiachen Zhang, "A Magnetic Capsule Robot with an Exoskeleton to Withstand Esophageal Pressure and Delivery Drug in Stomach," IEEE Robotics and Automation Letters, 2024.
- Xinliang Wang, Weida Kang, Xudong Liang, Kiwon Ban, Jun Liu, Jiachen Zhang, "A Magnetic Catheter with Force Sensing Capability toward Interventional Surgery," IEEE Robotics and Automation Letters, 2024.
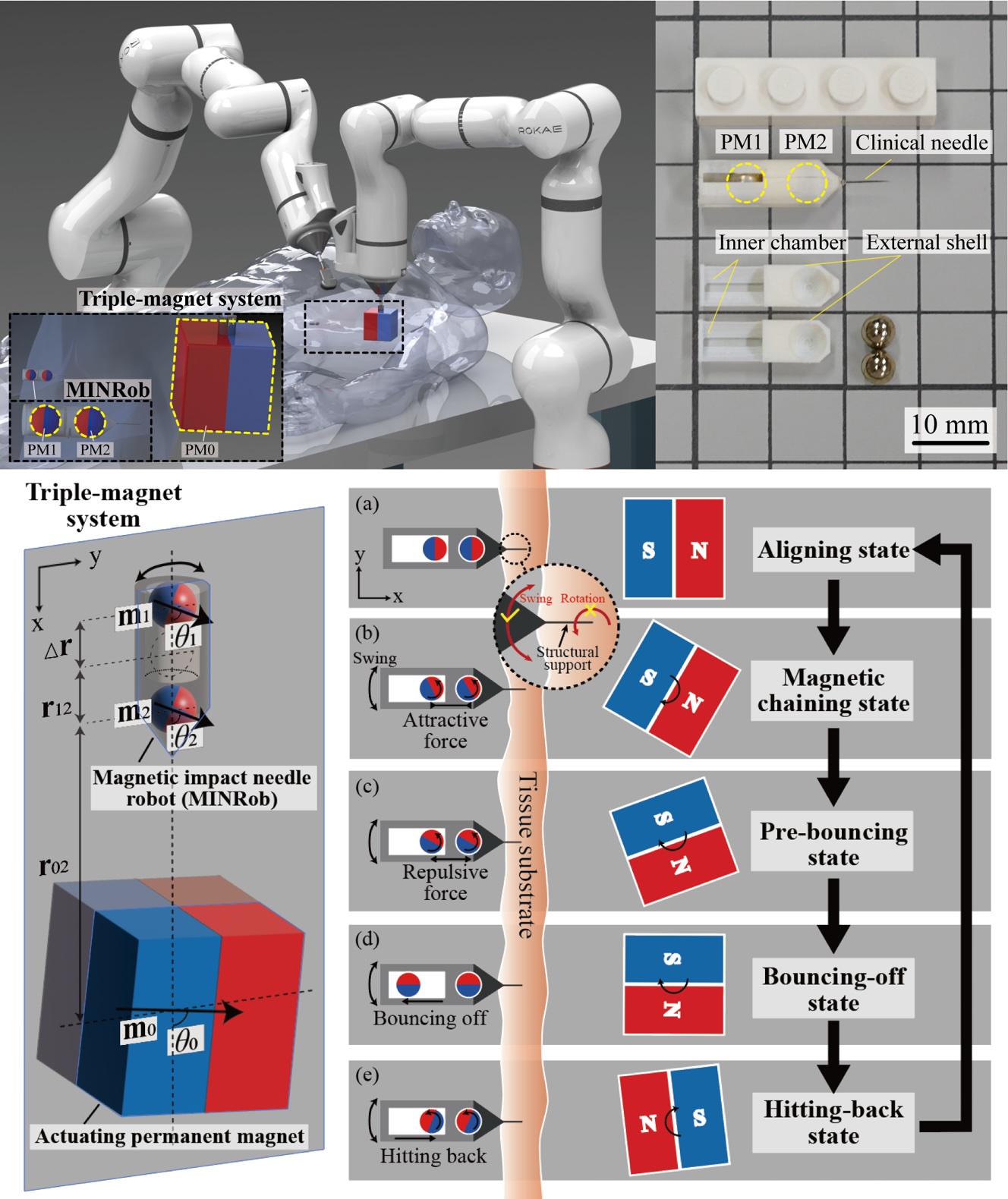
- Yuxuan Xiang, Ruomao Liu, Zihan Wei, Xinliang Wang, Weida Kang, Min Wang, Jun Liu, Xudong Liang, Jiachen Zhang, "Minrob: A large force-outputting miniature robot based on a triple-magnet system," IEEE Transactions on Robotics, pp. 3127-3145, 2024.
- Li Zhang, Li Wen, Jiachen Zhang, "Soft Robotics Across Scales: Fundamentals to Applications," Advanced Intelligent Systems, 2024.
- Ruomao Liu, Yuxuan Xiang, Zihan Wei, Jiachen Zhang, "A Computer‐Aided Teleoperation System for Intuitively Controlling the Behavior of a Magnetic Millirobot within a Stomach Phantom," Advanced Intelligent Systems, 2024.
- Zihan Wei, Zongze Li, Yuxuan Xiang, Jun Liu, Jiachen Zhang, "Magnetic Repulsion-Based Robot With Diverse Locomotion Capabilities," IEEE Robotics and Automation Letters, 2023.
- Min Wang, Jingjing Zhang, Ruomao Liu, Tianyi Wu, Wei Dai, Rui Liu, Jiachen Zhang, Jun Liu, "Liquid Metal-Based Flexible Sensor for Perception of Force Magnitude, Location, and Contacting Orientation," IEEE Transactions on Instrumentation and Measurement, 2023.
- Yuxuan Xiang, Jiachen Zhang, "A Theoretical Investigation of the Ability of Magnetic Miniature Robots to Exert Forces and Torques for Biomedical Functionalities," IEEE Robotics and Automation Letters, 2023.
- Jiachen Zhang, Ren Hao Soon, Zihan Wei, Wenqi Hu, Metin Sitti, "Liquid Metal‐Elastomer Composites with Dual‐Energy Transmission Mode for Multifunctional Miniature Untethered Magnetic Robots," Advanced Science, 2022.
Team members
ZHANG Jiachen, Ph.D.
- PI, Assistant Professor, Department of Biomedical Engineering
- Humboldt Fellow – Max Planck Institute for Intelligent Systems
- Ph.D. – University of Toronto
- M.Sc. – Worcester Polytechnic Institute
- B.Eng. – Harbin Engineering University
WEI Zihan
- Ph.D. student
- Research Assistant – Dalian University of Technology
- M.Eng. – Beihang University
- B.Eng. – Zhengzhou University

XIANG Yuxuan
- Ph.D. student
- B.Eng. – Xi’an Jiaotong University (Honors Youth Program)

WANG Xinliang
- Ph.D. student
- M.Sc. – Northwestern Polytechnical University
- B.Sc. – Northwestern Polytechnical University

LIU Ruomao
- Ph.D. student
- M.Sc. – City University of Hong Kong
- B.Sc. – Shenzhen University

ZHANG Yuting
- Ph.D. student
- M.Sc. – University of Macau
- B.Sc. – Hohai University

JIN Chunyu
- Ph.D. student
- M.Sc. – University of California, Berkeley
- B.Sc. – Northwestern Polytechnical University

WANG Wenbin
- Joint Ph.D. student
- B.Eng. – Beihang University

HE Yifan
- Ph.D. student
- M.Sc. – University of Science and Technology of China
- B.Eng. – Northwestern Polytechnical University